প্রজাতি নির্বিশেষে যে কোনো প্রাণী আরেকটি প্রাণীকে সহজেই বন্ধু মনে করার প্রধান শর্ত হলো – প্রাণীটির মস্তিষ্কে নিজের ও অপর প্রাণীটির মধ্যে বৈষম্য বোধের অভাব। এই বৈষম্য বোধের অভাবই উভয়ের মস্তিষ্কের ভাবনার মধ্যে বাঁধন গড়ে তোলে।
Read More »বন্ধু

প্রজাতি নির্বিশেষে যে কোনো প্রাণী আরেকটি প্রাণীকে সহজেই বন্ধু মনে করার প্রধান শর্ত হলো – প্রাণীটির মস্তিষ্কে নিজের ও অপর প্রাণীটির মধ্যে বৈষম্য বোধের অভাব। এই বৈষম্য বোধের অভাবই উভয়ের মস্তিষ্কের ভাবনার মধ্যে বাঁধন গড়ে তোলে।
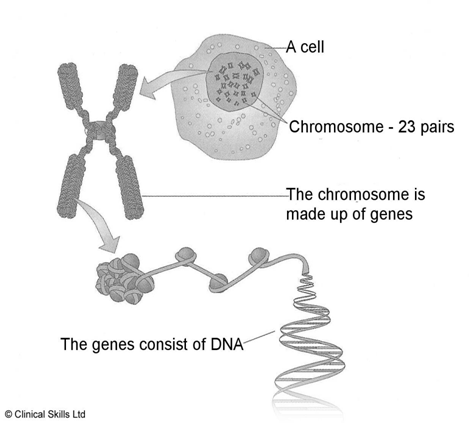
Read More »প্রোটিন হচ্ছে জীববিজ্ঞানের অন্যতম গুরুত্বপূর্ণ অণু। এগুলো আমাদের শরীরের প্রতিটি কোষে পাওয়া যায় এবং বিভিন্ন …
Read More »
ক্যারিয়ার বিষয়ক কিছু দেখলেই সেটাতে আমার চোখ আটকে যায়। আজকে ফেসবুকে “সিঙ্গাপুর প্রবাসী” সিঙ্গাপুর প্রবাসী …
Read More »
হয়ত জেনে আপনি অবাক হবেন যে আমাদের মস্তিষ্ক নতুন যা কিছু ভাবে, সেই ভাবনা আসলে আমাদেরই মস্তিষ্কে থাকা কোন না কোন স্মৃতির এনক্রিপ্টেড্ বা গূঢ়লেখিত রূপ। অন্যভাবে বললে, যে কোন আবিষ্কার বস্তুত আমাদের জানা কোন বিষয়কেই এক নতুন দৃষ্টিভঙ্গিতে দেখা ছাড়া আর কিছুই নয়। যুগ যুগ ধরে মানুষ প্রকৃতির ক্রিয়াকলাপের নানা দিক বিশেষ করে প্রকৃতির সৃষ্টি করা জীব ও তাদের জীবন-ধারণ পর্যবেক্ষণ করছে, সেগুলিকে স্মৃতিবদ্ধ করেছে - প্রকৃতির সাথে এই রসায়নেই মনুষ্য-মস্তিষ্ক হয়েছে গর্ভবতী, প্রসব করেছে প্রযুক্তি !
Read More »লেখক: সৈয়দ শামসুল হক কবিতা লিখি, যেমন আমার অভ্যেস — প্রথমে খাতার পাতায় কলমে, তারপর …
Read More »Dedicated to Bronte sisters, Preetilota, Bahar, Shomir and Topee (♥♪♥) Dr Abdullah A. Kafi is …
Read More »


শুরুতেই আপনাকে আমি টাইম মেশিনে আজ থেকে ৫০ বছর আগে নিয়ে যাচ্ছি নিউইয়র্ক এর ৬ষ্ট …
Read More »

জৈব কৃষি একটি বাস্তবসম্মত পদ্ধতি যা আজকের অর্থনীতির তুলনায় আগামীকালের বাস্তুসংস্থানকে আরো গুরুত্বপূর্ণ বলে উপলব্ধি …
Read More »




বেণুবর্ণা অধিকারী পাতার উদ্গম ও ঝরে যাওয়া, আবারও পত্রপুষ্পে বৃক্ষের পল্লবিত হওয়া—এ তো প্রকৃতির স্বভাবধর্ম,মানুষও …
Read More »


ধারণা করা হচ্ছে যে সামনের বিশ্বে কৃত্রিম বুদ্ধিমত্তা দারুণভাবে ভূমিকা রাখবে। সেটা ভালো হবে কি …
Read More »




{mosimage}সম্প্রতি কলকাতার এক গবেষণা কেন্দ্র থ্যালাসেমিয়া চিকিৎসার জন্য গমের extract এর কার্যকারিতার সন্ধান পেয়েছেন। উল্লেখ্য, …
Read More »

Book Chapter Book Title: Biopolymers Online Polyamides and Complex Proteinaceous Materials Authors: Dr. Costas N. …
Read More »
সামনে আসছে গুগলের বিস্ময়কর চশমা ‘গুগল গ্লাস’৷ বসে নেই অ্যাপল-ও৷ তাদের স্মার্টওয়াচ ‘আইওয়াচ’ বাজারে আসার …
Read More »



(গণিত বিষয়ক নিবন্ধ ও অন্যান্য অনেক কিছু নিয়মিত ভাবে অনুবাদ করে বাংলা উইকিপিডিয়াতে যুক্ত করছি …
Read More »

উৎসর্গঃ সৃষ্টির সেবক, রেডিও আবিষ্কারক স্যার জগদীশ চন্দ্র বসু – যাঁর স্পর্শে পৃথিবী ধন্য! …
Read More »



কৃত্রিম বুদ্ধিমত্তা নিজস্ব ভাষাতে যোগাযোগের পরে ফেসবুক তা বন্ধ করে দেয় সামনের দশকে যে প্রযুক্তি …
Read More »



Normal 0 MicrosoftInternetExplorer4 /* Style Definitions */ table.MsoNormalTable {mso-style-name:”Table Normal”; mso-tstyle-rowband-size:0; mso-tstyle-colband-size:0; mso-style-noshow:yes; mso-style-parent:””; mso-padding-alt:0in …
Read More »



লেখকঃ হিমাংশু কর সংগৃহীতঃ ফেইসবুক পোস্ট পদার্থবিজ্ঞানে প্রতিসাম্যের ধারণা খুবই গুরুত্বপূর্ণ। এটা এতই গুরুত্বপূর্ণ …
Read More »



সিজানুররহমান বায়োটেকনোলোজিএন্ডজেনেটিকইঞ্জিনিয়ারিংবিভাগ ইসলামীবিশ্ববিদ্যালয়, কুষ্টিয়া। যদি হঠাৎকেউ আমাকে প্রশ্ন করে,’আচ্ছা বায়োটেকনোলোজি কি?’ তাহলে আমি কোন কিছু চিন্তা না করেই উত্তর দিই, “বায়োটেকনোলোজি হচ্ছে জৈব–প্রযুক্তি!” ব্যাপারটা হাস্যকর মনে হলেও এর বাইরে আমার মাথায় বায়োটেকনোলোজির কোন সংজ্ঞা আসেনা।অথচ বায়োটেকনোলোজির সংজ্ঞা দেবার জন্য শতাধিক রেফারেন্স হাজির করা যায়।আর যদি প্রশ্নটা হয়, “বায়োটেকনোলোজি কোন কোন ক্ষেত্রে কাজ করে?” তাহলে এর উত্তরে কয়েক মিনিট বলার পরে চিন্তা করে দেখতে হয়; কিছু বাদ গেল না তো! আসলে বর্তমানে বায়োটেকনোলোজি এতটা বিস্তৃত হয়ে পড়েছে যে, এর ক্ষেত্রগুলো কি কি তাই নিয়ে কয়েকখন্ডে একটা বইলিখলেও কম হবে; কারণ প্রতিনিয়ত বায়োটেকনোলোজির ক্ষেত্র বৃদ্ধি পাচ্ছে। ১৯১৯ সালে Karl …
Read More »


{mosimage}বহু বছর ধরে মানুষ সৌরজগতের 5 টি গ্রহের কথা জানতো,এই পাচটির মধ্যে শনি ছিল সবার …
Read More »


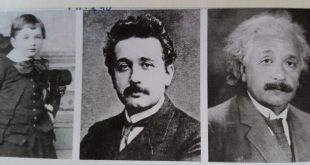
Albert Einstein, the iconic physicist of the twentieth century, was born at a time when …
Read More »


[ ♪ উৎসর্গ : প্রীতিলতা ♪ ] বহুমুখী জ্যোতির্ময় – তারান্নুম আফরীন! বর্তমানে পি.এইচ.ডি. করছেন অস্ট্রেলিয়ার Deakin …
Read More »



প্রজাতি নির্বিশেষে যে কোনো প্রাণী আরেকটি প্রাণীকে সহজেই বন্ধু মনে করার প্রধান শর্ত হলো – প্রাণীটির মস্তিষ্কে নিজের ও অপর প্রাণীটির মধ্যে বৈষম্য বোধের অভাব। এই বৈষম্য বোধের অভাবই উভয়ের মস্তিষ্কের ভাবনার মধ্যে বাঁধন গড়ে তোলে।
Read More »